



Der findes forskellige typer lagerhylder på lageret, og opbevarings- og genfindingsmetoderne er hovedsageligt opdelt i følgende kategorier, herunder manuel opbevaring og genfinding, gaffeltrucks opbevaring og udtagning samt automatisk opbevaring og genfinding. I dag ønsker mange virksomheder at realisere automatisk lagerdrift, så de ønsker at bruge automatiserede lagerhylder. For eksempel er fire-vejs bilstativ en slags automatisk opbevaringsstativ. Hvordan kommer 4-vejs shuttlen AGV ind og ud af lageret? Lageret tunge hylde produktionsanlæg Haigris analyseret.

Firevejs shuttlelager
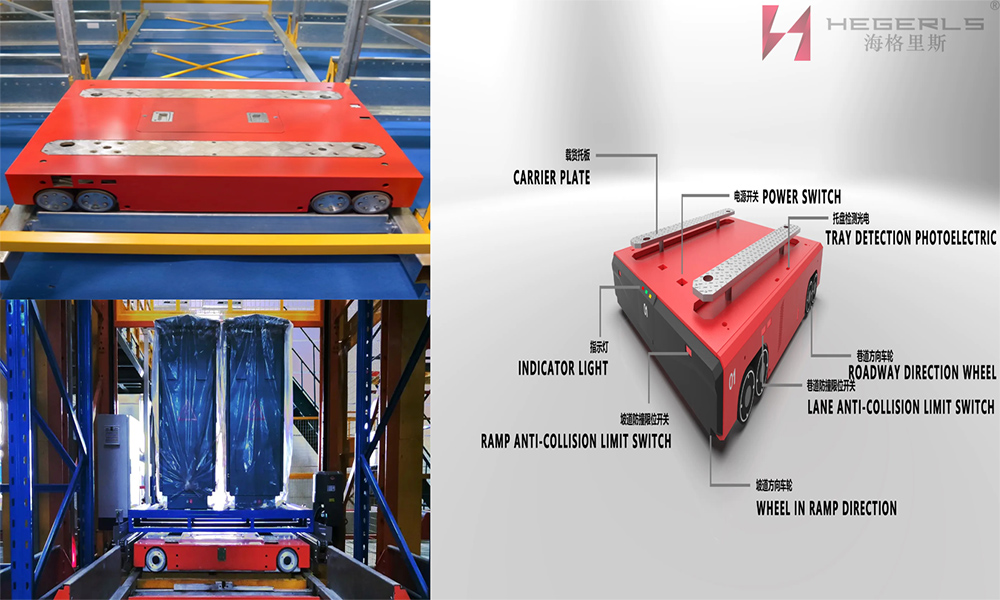
Fire-vejs pendulvognen er udstyret med 12 hjul, som kan køre i fire retninger langs sporplanet og frit nå ethvert lastrum på lagerplanet. Fire-vejs shuttlen drives af hjulene på begge sider på samme tid for at sikre, at karosseriet ikke bøjer sig under drift, og det kan løbe skiftevis langs de langsgående og tværgående skinner på den tredimensionelle hylde.

Samtidig er 4-vejs shuttlen en intelligent håndteringsenhed, der ikke kun kan gå på langs, men også på tværs. 4-vejs shuttlen har høj fleksibilitet, kan ændre kørebanen efter ønske og justere systemets kapacitet ved at øge eller mindske antallet af shuttlebiler. Hvis det er nødvendigt, kan systemets spidsværdi reageres på ved at etablere planlægningstilstanden for det arbejdende køretøjsteam, løse flaskehalsen ved ind- og udkørsel og kan også erstattes med hinanden, når en shuttle eller elevator fejler, andre shuttle eller elevatorer kan sendes gennem ekspeditionssystemet for at fortsætte med at fuldføre operationen uden at påvirke systemets kapacitet. Denne enhed er velegnet til både lavflow- og high-density storage, såvel som high flow og high-density storage. Det kan opnå større effektivitet, omkostninger og ressourcer.
Hvordan kommer 4-vejs shuttlen AGV ind og ud af lageret?

1) Lagermetode
a) Teknikerne af den intelligente 4-vejs shuttle tænder først den intelligente 4-vejs shuttle og gør den klar. Den intelligente 4-vejs shuttle er på standby;
b) Efter at have bekræftet plukkestedet for den intelligente 4-vejs shuttle, vil WCS planlægge kørselsruten i henhold til den aktuelle placering og destinationsplacering for den intelligente 4-vejs shuttle, og derefter vil personalet distribuere varer til den intelligente 4-vejs shuttle shuttle gennem WCS;
c) Den intelligente 4-vejs shuttle begynder at udføre leveringsopgaven i henhold til den modtagne opgavekommando;
d) På det krydsende spor kører den intelligente 4-vejs shuttle i forskydningstilstand gennem den faktiske distance. Under kørselsprocessen scanner den kontinuerligt de spor, som den nederste del af køretøjets krop passerer igennem. Hver krydsningsposition, den passerer, bedømmer og kalibrerer den afstand, den tilbagelægger ved at scanne sporene. Når den er tæt på destinationen, finjusterer den parkeringspositionen gennem den laterale lasersensor for at opnå nøjagtig positionering af parkeringspositionen;
e) I underkanalen kan den intelligente 4-vejs shuttle scanne tværsporet og sidekalibreringsspejlreflektoren, bedømme og kontrollere køreafstanden ved at scanne punktpositionen og opnå nøjagtig positioneringskontrol i underkanalen for at nå destinationen;
f) Når den intelligente 4-vejs shuttle ankommer til den valgte plukkeposition, falder pallen, varerne lægges på hylden, og WCS-systemet får besked om afslutningen af leveringsopgaven;
g) Den intelligente 4-vejs shuttle fortsætter med at modtage opgaveinstruktioner eller vender tilbage til standbyområdet.
2) Leveringsmetode
a) Teknikerne af den intelligente 4-vejs shuttle tænder først den intelligente 4-vejs shuttle og gør den klar. Den intelligente 4-vejs shuttle er på standby;
b) Efter bekræftelse af plukkestedet for den intelligente 4-vejs shuttle, vil WCS planlægge kørselsruten i henhold til den aktuelle placering og destinationsplacering for den intelligente 4-vejs shuttle, og derefter sender personalet plukkeopgaven til den intelligente 4. -vejs shuttle gennem WCS;
c) Den intelligente 4-vejs shuttle begynder at hente varer i henhold til den modtagne opgavekommando;
d) På det krydsende spor kører den intelligente 4-vejs shuttle i forskydningstilstand gennem den faktiske distance. Under kørselsprocessen scanner den kontinuerligt de spor, som den nederste del af køretøjets krop passerer igennem. Hver krydsningsposition, den passerer, bedømmer og kontrollerer den afstand, den tilbagelægger ved at scanne sporene. Når den nærmer sig destinationen, finjusterer den parkeringspositionen gennem den laterale lasersensor for at opnå præcis positioneringskontrol og parkering;
e) I underkanalen scanner den intelligente 4-vejs shuttlebil krydssporet og sidekalibreringsspejlreflektoren, bedømmer og kalibrerer køreafstanden ved at scanne disse punkter og realiserer kontrollen af præcis positionering i underkanalen for at nå destinationen .
Indlægstid: 19. september 2022